


در پیشرفتی خارقالعاده، ربات انسان نما iRonCub3 با استفاده از نیروی جت پرواز کرد. این دستاورد، افقهای جدیدی برای رباتهای امداد و اکتشاف میگشاید.
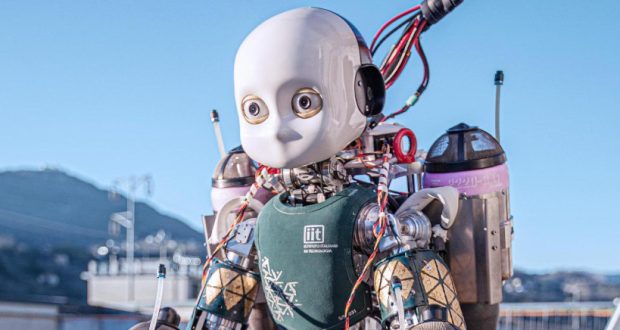
در یک پیشرفت فناورانه خیرهکننده، محققان در ایتالیا موفق به ساخت و آزمایش اولین ربات انسان نما با نیروی جت در جهان شدهاند. این دستگاه که iRonCub3 نام دارد، توانست حدود ۵۰ سانتیمتر از زمین بلند شده و تعادل خود را در طول پرواز حفظ کند.
این ربات انسان نما توسط مؤسسه فناوری ایتالیا (IIT) توسعه یافته است. هدف اصلی از طراحی آن، فعالیت در محیطهای واقعی با استفاده از قابلیتهای پروازی و ساختاری شبیه به انسان است. این موفقیت، گامی بزرگ در حوزه رباتیک چندوجهی محسوب میشود. ربات iRonCub3 حرکت زمینی را با پرواز کنترلشده ترکیب میکند. این پیشرفت مسیر را برای مأموریتهای نجات آینده و عملیات اکتشاف در مکانهای پیچیده یا خطرناک هموار خواهد کرد.
ویدیوی عملکرد این ربات را در یوتیوب تماشا کنید
استفاده از فناوریهای پیشرفته در ساخت ربات انسان نما
ربات iRonCub3 بر پایه نسل سوم ربات انساننمای iCub ساخته شده است و بهصورت تلهاپراتوری کنترل میشود. این ربات چهار موتور جت دارد: دو موتور روی بازوها و دو موتور دیگر در یک واحد کولهپشتی قرار گرفتهاند. این پیکربندی به آن اجازه میدهد حتی در حضور باد یا اختلالات فیزیکی، شناور بماند و پایدار عمل کند.

این ربات انسان نما ۷۰ کیلوگرم وزن دارد و میتواند بیش از ۱۰۰۰ نیوتن رانش تولید کند. توربینهای آن گازهای خروجی با دمای ۸۰۰ درجه سانتیگراد را خارج میکنند. این ویژگی نیاز به ستون فقرات جدیدی از جنس تیتانیوم و پوششهای محافظ مقاوم در برابر حرارت را الزامی کرده است. تیم تحقیقاتی دو سال را صرف توسعه ربات و انجام آزمایشهای پرواز کردهاند.
- نخستین المپیاد جهانی رباتهای انساننما با حضور نخبگان هوش مصنوعی برگزار میشود
- هندیها ربات انساننما برای ماموریتهای نظامی پرخطر میسازند
- تماشا کنید: وقتی ربات انسان نمای چینی به سمت انسانها حمله میکند
- تماشا کنید: ربات انساننما چینی Unitree G1، دست میدهد و شما را بغل میکند
دانیل پوچی، رئیس آزمایشگاه هوش مصنوعی و مکانیکی (AMI) در IIT، میگوید: این تحقیق بهطور اساسی با رباتیک انساننمای سنتی متفاوت است و ما را مجبور کرده که جهشی قابلتوجه در مقایسه با وضعیت فعلی هنر داشته باشیم.
نقش مهم هوش مصنوعی در توسعه این ربات موتور جتدار
پایداری در طول پرواز یک چالش کلیدی بود. برخلاف پهپادها که متقارن و فشرده هستند، iRonCub3 اندامهای متحرک و بدنی کشیده دارد. این ویژگیها دینامیکهای آیرودینامیکی و مرکز جرم متغیری را ایجاد میکنند. برای حل این مشکل، محققان مدلهای جدید کنترل پرواز و برآوردگرهای آیرودینامیکی بیدرنگ را توسعه دادند. تیم IIT برای آزمایش تونل باد با پلیتکنیک میلان و برای کاربردهای یادگیری ماشین با دانشگاه استنفورد همکاری کرده است.
آنتونلو پائولینو، نویسنده اول مقاله، توضیح میدهد: مدلهای ما شامل شبکههای عصبی هستند که بر اساس دادههای شبیهسازیشده و تجربی آموزش دیدهاند و در معماری کنترل ربات یکپارچه شدهاند تا پروازی پایدار را تضمین کنند. این سیستمهای مجهز به هوش مصنوعی به iRonCub3 اجازه میدهند در برابر جریانهای هوای آشفته و تغییر موقعیت اندامها در حین پرواز واکنش نشان دهد. ربات همچنین میتواند انتقالهای سریع مانند احتراق متوالی جت یا حرکت ساختاری در هنگام بلند شدن را مدیریت کند.

کاربردهای بالقوه این ربات چیست؟
آزمایشهای اولیه پرواز در آزمایشگاه داخلی IIT انجام شد، جایی که ربات با موفقیت در هوا شناور ماند. آزمایشهای آینده به یک منطقه پرواز اختصاصی در فرودگاه جنوا منتقل خواهد شد. این منطقه با همکاری فرودگاه جنوا راهاندازی شده است.
رباتهای انساننمای پرنده مانند iRonCub3 ممکن است در مناطق فاجعهزده، محیطهای سمی یا مأموریتهایی که هم به پرواز و هم به دستکاری نیاز دارند، استفاده شوند. این تحقیق در نشریه معتبر Nature Communications Engineering به چاپ رسیده است.



























