


پهپاد DRAGON که توسط محققان “JSK Lab” طراحی شده، قادر است هنگام پرواز، خود را به اشکال مختلفی از جمله دایره و مستطیل تبدیل کند.
محققان “JSK Lab” از دانشگاه توکیو با استفاده از تعداد زیادی پهپاد با توانایی تغییر شکل هنگام پرواز، موفق به توسعه پهپاد DRAGON یا «اژدها» شدهاند. نهتنها این پهپاد جدید توانایی تغییر شکل و تبدیل شدن به اشکال مختلفی همچون مربع یا مستطیل را دارد، بلکه میتواند با توجه به محیط و شکل مورد نیاز برای پرواز، به صورت خودکار برای تغییر تصمیمگیری کند.
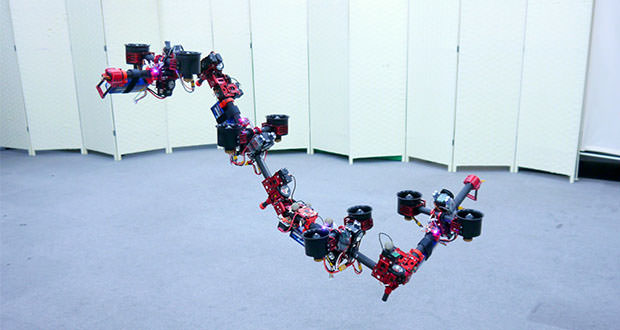
اسم این پهپاد در واقع مخفف عبارت طولانی “Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON” بوده و با نام کوتاه “DRAGON” شناخته میشود. مهندسان در طراحی DRAGON از بادبادکهای سنتی اژدهاشکل الهام گرفتهاند؛ جایی که برای دم از مجموعهای کوچکتر از بادبادکهای متصل و پشت سر هم استفاده میشود.
هرکدام از پهپادهای کوچک از یک جفت فن قدرت گرفته و تنظیم آنها تقریبا در هر جهت برداری امکانپذیر است. کیت توسعه Intel Euclid مسئولیت کنترل کل این سیستم را بر عهده دارد و پک باتری تعبیهشده در محور اصلی به آن اجازه میدهد برای سه دقیقه پرواز کند. نسخه خاص پهپاد DRAGON که در ویدیوی ضمیمهشده تماشا خواهید کرد، چهار ماژول داشته و ضمن تغییر شکل به یک مربع، در بخش پایانی به طرف بالا حرکت کرده و در همان حال، اجزای کوچکتر به حالت باز شدن تغییر شکل میدهند.
اگرچه این نوع خاص از پهپاد برای حرکت در فضاهای کوچک به کار گرفته میشود، ولی تیم توسعهدهنده زمینههای استفاده بسیار بزرگتری را برای آن پیشبینی میکنند. پهپاد DRAGON توانایی بهرهگیری از 12 ماژول مختلف را داشته و JSK آن را به عنوان یک بازوی پرنده میبیند؛ چیزی که با چیزهای دیگر تعامل داشته و ضمن حرکت قادر به دستکاری اشیای مختلف است. DRAGON حتی میتواند به کمک دو پهپاد انتهایی خود، چیزها را همانند یک گاز انبر از جای خود بردارد.
اگرچه فعلا زمینههای بهکارگیری این پهپاد مبهم است، ولی قطعا فناوری های آن بسیار جذاب خواهد بود. شاید DRAGON استفاده صنعتی داشته باشد (به عناون مثال، داکتها را هدایت کند) یا ممکن است روزی در سناریوهای جستجو و نجات مورد استفاده قرار گیرد. “Moju Zhao”، استادیار دانشگاه توکیو در گفتگویی با “Digital Trends” گفت که توسعه این پروژه هنوز به پایان نرسیده است:
ما با استفاده از ماژول اصلی خود، در جهت طراحی مدلی چندپا از این پهپاد پیش خواهیم رفت. در این حالت، ربات نهتنها قادر به پرواز خواهد بود، بلکه توانایی راه رفتن روی زمین هم به آن اضافه میشود. این موضوع میتواند از منظر بهرهوری انرژی سودبخش باشد.
چنین تصمیم خودمختاری در مورد جابجایی، با توجه به محیط، تحقیق بسیار جذابی است. رویای نهایی ما دستیابی به چیزی پرنده و مشابه انسان است؛ مثل یک آیرونمن بدون سرنشین.




























نیوتون کجایی که جاذبت دیگ زیر سوال رفت
قانون جاذبه رو زیر سوال برد
جالب بود
چه باحال یاد ایران برا عروسیا
چ ربطی داره