
این روزها ربات های بسیار زیادی توسط شرکتهای مختلف تولید میشود که هر کدام به به تکنولوژزی های مخصوص خود مجهز بوده و میتوانند مخاطبین خاص خود را داشته باشند. اما شاید در این زمینه، “ربات انسان نما” بتواند بیش از هر مورد دیگری توجه کاربران را جلب کند، ربات هایی که مشکل ایستادن بر روی یک پا را دارند. ولی به نظر میرسد که این طلسم شکسته شده و حالا محققین شرکت رباتیک بوستون داینامیک (Boston Dynamics) موفق به توسعه الگوریتمی جدید برای ربات انسان نما اطلس (Atlas) شدهاند که میتواند امکان حفظ تعادل این ربات بر روی یک پا را فراهم نماید.
حفظ تعادل ربات انسان نما اطلس بر روی یک پا، جدیدترین دستاورد بوستون داینامیک
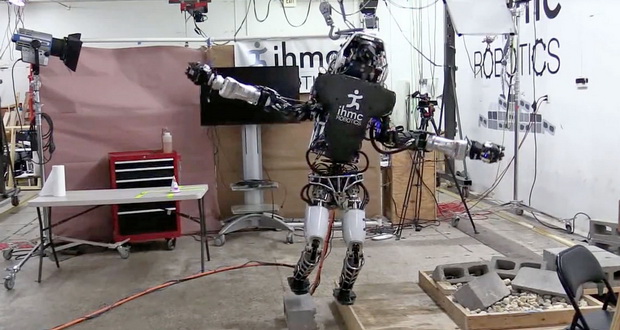
در ویدئوی جدیدی که IHMC منتشر کرده، ربات انسان نما اطلس بوستون داینامیک، نشان داده میشود که به کمک یک پا، لبه یک تخته 0.8 اینچی ایستاده است. البته IHMC اشاره داشته که مدتها پیش این پا برای اطلس طراحی شده بوده و حالا شاهد استفاده آن هستیم. در ویدئو منتشر شده نیز پیش از افتادن این ربات، شاهد لرزش بدن اطلس هستیم که IHMC دلیل آن را ضعف الگوریتم سازندگان در تخمین زدن وضعیت ربات دانسته است.
هر چند باید اشاره کنیم که عملکرد ربات اطلس بسیار خوب بوده و شاید بسیاری از مردم، حداقل برای بار اول، نتوانند تا این اندازه بر روی یک پا خود و بر لبه این تخته 0.8 اینچی، تعادلشان را حفظ کند. شاید بتوان انجام این کار را یک استعداد و یا یک مهارت نیز تلقی کرد، مهارتی که انسانها باید آن را تجربه کنند اما رباتها از قبل آن را کسب کرده و میتوانند حتی برای بار اول، چنین کاری را به بهترین شکل ممکن انجام دهند.