


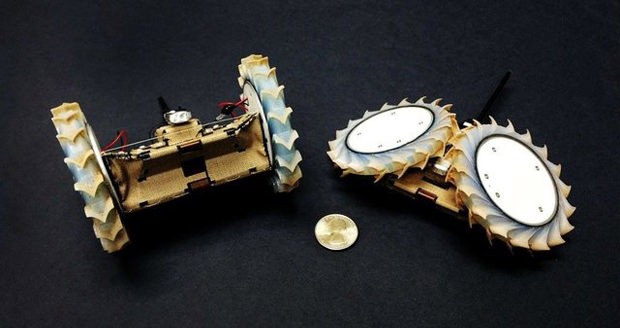
دانشمندان لابراتور مهندسی پیشرانه جت ناسا در کالیفرنیا از یک ربات کوچک و سبک برای اکتشاف در مریخ رونمایی کردند. ربات پافر (Puffer Robot) با الهام گرفتن از تکنیک اوریگامی ساخته شده است.
ایده کلی برای ساخت این ربات کوچک و چالاک، قرارگیری چند ربات مسطح و سبک در محموله کاوشگر بعدی مریخ است تا بتوانند در کنار کاوشگر اصلی با سرعت و چالاکی بیشتری به کاوش و اکتشاف در سطح سیاره سرخ بپردازند و اطلاعات خود را به صورت بیسیم به کاوشگر اصلی انتقال بدهند.

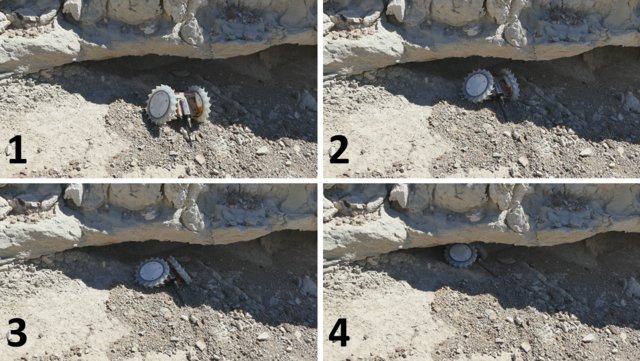
دسترسی به نقاط غیرقابل تردد مریخ توسط ربات پافر
مهمترین ویژگی ربات پافر ، تردد در تمام سطوح پیشبینی شده در مریخ است. این ربات هوشمند به شکلی طراحی شده تا بتواند از هر سطحی بالا برود و حتی در مکانهای غیرقابل دسترس مانند زیر صخرهها نیز جستجو کند. طراحی بسیار ساده و قابلیتهای شگفتانگیز با الهام گرفتن از تکنیک اوریگامی موجب شده تا مدیران ناسا پس از مشاهده نخستین آزمایش این نسل از کاوشگرها، برای ارسال چند نمونه از آنها در ماموریتهای آینده کاوشگر مریخ به نقطه نظر مشترکی برسند. به عبارت دیگر، طراحی شگفتانگیز این ربات، قدم بزرگی برای انتقال دانش اوریگامی از حوزه هنر به صنایع پیشرفته رباتیک است.
جیکو کاراس، مدیر پروژه طراحی و ساخت ربات پافر در خصوص ساخت این کاوشگر میگوید:
این ربات تغییر شکلدهنده با طراحی منحصربهفرد خود، در هنگام انتقال کاملا صاف و بدون هرگونه برجستگی است. پس از اتمام ماموریت انتقال به سیاره مریخ، مجموعه رباتهای مستقر در پنل از حالت خواب فضایی خارج میشوند و با تغییر شکل ظاهری، به سرعت با کاوشگر اصلی ارتباط برقرار میکنند تا هر کدام از آنها در کنار ماموریت اصلی کاوشگر مریخ توسط تیم زمینی به جستجو و اکتشاف بپردازند.
انرژی حرکتی ربات پافر در مرحله آغاز توسط شارژ اولیه باتری تامین میشود و سپس هر یک از رباتها به وسیله سامانه کنترل اصلی موجود در کاوشگر مریخ در صورت نیاز در برابر نور قرار میگیرند تا شارژ شوند.



























