



با توجه به پیشرفتهای اخیر در صنعت رباتیک میتوان پیشبینی کرد که در آیندهی نه چندان دور رباتها بهکلی وظایف مهمی را در فضا از سفینههای فضایی گرفته تا بازوهای رباتیک، برعهده خواهند گرفت. در ادامه شما را با 16 ربات فضایی پیشرفته آشنا خواهیم کرد.
16 مورد از پیشرفتهترین ربات فضایی
فناوریهای پیشرفتهی ناسا فقط به صنعت مربوط نمیشود بلکه فضانوردان نیز از این تکنولوژی در فضا نیز استفاده میکنند. با کمک این رباتهای فضایی توانستیم دانش خود را افزایش دهیم و به کاوش در مریخ و دیگر سیارات بپردازیم که درواقع اکتشافات صورتگرفته بدون این رباتهای فضایی غیرممکن بود. مریخ نوردها، فضاپیماها و مدارگردها که تا بهحال به منظومه شمسی فرستاده شدهاند در واقع مدلهای مختلفی از همین رباتها هستند که در طول زمان پیشرفته و کامل شدهاند. همراه گجت نیوز باشید.
ربات فضایی دکستر (Dextre)

این ربات فضایی مسئول تعمیرات و نگهداری از ایستگاه فضایی بین المللی (ISS) را بر عهده دارد. دکستر مجهز به 2 بازو مخصوص است و با کمک آنها میتواند تجهیزات مربوط به رصد کهکشانها و باتریها را تعویض کند.
فضاپیمای کاسینی (Cassini)
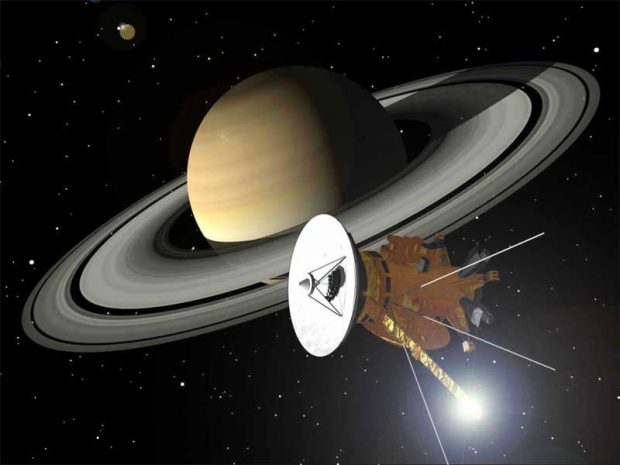
فضاپیمای کاسینی یکی از برجستهترین ربات فضایی تاریخ بشر است که طی 30 سال و توسط محققان و مهندسان علوم فضایی ساخته شده است. فضاپیمای کاسینی نخستین بار در سال 1997 و در طی یک پرتاپ تاریخی به فضا ارسال شد و سرانجام در سال 2004 به مدار سیاره زحل رسید و از همان زمان نیز ماموریت وی در زمینه تحقیق و مطالعه روی دیگر مدارهای زحل آغاز شد. کاسینی در طول ماموریتهای خود، اکتشافات بزرگی داشته است که از بین آنها میتوان به مواردی همچون یک اقیانوس جهانی در قمر انسلادوس با نشانههایی از فعالیتهای هیدروترمال در آن و دریاهایی با متان مایع در قمر تایتان اشاره کرد.
کاوشگر فضایی تحقیقاتی کاسینی-هویگنس، پروژهی مشترک ناسا، آژانس فضایی اروپا و آژانس فضایی ایتالیا است. فضاپیمای کاسینی در سپتامبر امسال آخرین ماموریت خود را با ورود به فضای بخش پایینی حلقههای زحل آغاز کرد. این سوال مطرح میشود که چرا ناسا به دنبال نابود کردن با ارزشترین سفینه فضایی موجود است؟ ارل میز، مدیر پروژهی فضاپیمای کاسینی در این باره میگوید:
باتوجه به پایان یافتن سوخت این فضاپیما بازگشت به وضعیت پایدار ممکن نیست، بنابراین تنها راه ممکن استفاده حداکثری از این فضاپیما و شکار اولین تصاویر از فضای زیر سطحی و پنهان زحل است.
روبونات 2 (Robonaut 2)

کار بر روی اولین روبونات در سال 1997 شروع شد. ایده کار ساخت یک ربات فضایی انسان نما، این بود که بتواند به فضانوردان در کارهایی که وجود یک جفت دست دیگر میتوانست مفید باشد، یا در کارهایی که ممکن بود جان فضانوردان به خطر افتد، یاری رساند. این رباتها به ابزارهای بهخصوصی برای کار احتیاج نداشته و دقیقا از همان ابزارهایی که فضانوردان از آنها بهره میبرند، استفاده میکنند. روبونات در دو مدل که با نام های R1 و R2 شناخته میشود، انتشار یافت. در سال 2010 میلادی، روبونات 2 یا همان R2، رونمایی شد. R2 قابلیت حرکت با سرعتی حدودا چهار برابر R1 را داراست، نسبت به R1 کوچکتر، ماهرتر و دارای احساس عمیقتر و بیشتری میباشد.
این ربات فضایی میتواند دستانش را با سرعت 2 متر بر ثانیه حرکت دهد و قابلیت حمل بار حدود 18 کیلوگرم را دارد. روبونات 2 از چالاکی باورنکردنی برخوردار است، میتواند دستهای خود را در 12 جهت مختلف حرکت دهد، بازو و مچ دستهایش را در هفت جهت مختلف تاب بدهد که برای انجام این حرکات از 54 موتور مجزا استفاده میکند. هر یک از بازوها از سلولهای لمس کنندهای برخوردارند که میتوانند وزن و فشار را احساس کنند. تا قبل از سال 2014 بدن روبونات 2 تنها از بالا تنه تشکیل شده بود اما بعد از آن سال، 2 عدد پا نیز به نیمتنه اضافه شد.
فضاپیمای روزتا (Rosetta)

سفینه فضایی روزتا یک کاوشگر فضایی رباتیک است که توسط سازمان فضایی اروپا برای یک مطالعه دقیق از دنبالهدار 67 پی ساخته و راهاندازیشد. هزینه طرح ساخت و پرتاب روزتا را کشورهای اروپایی تامین کردند با این هدف که برای اولین بار، از نزدیک بتوانند خصوصیات یک دنبالهدار را مطالعه کند. سفینه یا همان فضاپیمای روزتا سرانجام در ماه اوت سال 2014 پس از طی مسافتی نزدیک به شش میلیارد کیلومتر به مدار دنبالهدار 67 پی رسید و در ماه نوامبر، کاوشگر فیله را به سوی سطح دنبالهدار رها کرد. این ربات فضایی صحیح و سالم بر سطح دنبالهدار فرود آمد اما باطریهای خورشیدی آن پس از سه روز تمام شد. کارشناسان مرکز کنترل آژانس فضایی اروپا گفتند که سفینه در سایه قرار گرفته و به خاطر نبودن نور خورشید، قادر به فعالیت نیست.
در سال 2015 که دنبالهدار 67 پی به خورشید نزدیکتر شده بود، باطریهای کاوشگر برای مدتی کوتاه به کار افتاد. با بروز این مشکلات، محققان ترجیح دادند این فضاپیما از گردونه خارج شود و تصمیم گرفتند آن را با فرستادن به سطح 67 پی، به فضاپیمای فیله ملحق کنند. سرانجام فضاپیمای روزتا در 30 سپتامبر 2016 در اثر برخورد انتحاری با دنبالهدار 67 پی به ماموریت خود پایان داد. روزتا پیش از متلاشی شدن آخرین اطلاعات خود از این جرم آسمانی را به زمین ارسال کرد. یکی از کاملترین تحقیقات در مورد ستارههای دنبالهدار توسط همین سفینه انجام گرفته بود که با استفاده از این ربات فضایی دانشمندان اطلاعات بسیار خوبی را در مورد منشاء منظومهی شمسی بهدست آوردند.
فضاپیمای دان یا سپیده دم (Dawn)
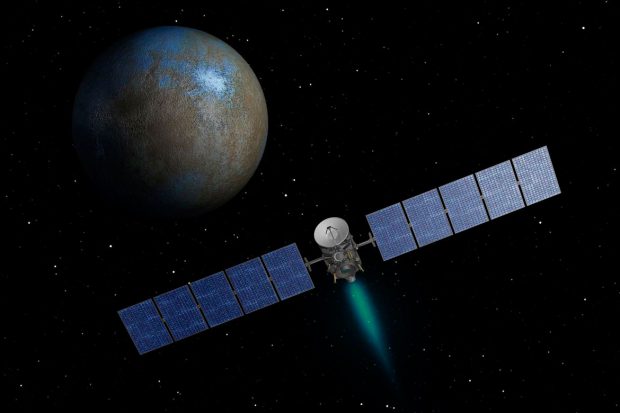
سفینهی فضایی دان (Dawn) در آخر مسیر خود است، گرچه روزهای پایانی این کاوشگر بهاندازهی روزهای پایانی کاسینی دراماتیک نیست. ماموریت 467 میلیون دلاری سپیده دم در سال 2007 برای مطالعهی وستا و سرس، دو عدد از بزرگترین اجسام در کمربند سیارکی میان مریخ و مشتری، آغاز شد. این سفینهی فضایی از سال 2011 تا 2012 به دور وستا میچرخید و در مارچ 2015 به سیارهی کوتولهی سرس رسید و برای اولین بار بود که یک کاوشگر به مدار دو جسم به غیر از سیستم ماه-زمین چرخید. مشاهدات سپیده دم واقعیات بزرگی را در مورد وستای سنگی و سرس یخی آشکار کرد. این ربات فضایی نقاط سفید بر روی چندین دهانهی سرس را شناسایی کرده و شواهدی مبنی بر وجود یخ آب در زیر سطح سیارهی کوتوله پیدا کرد.
فضاپیمای سپیده دم پس از انجام ماموریت ابتدایی خود در سال 2016، ماموریت دیگری را آغاز کرده است. پس از آنکه این کاوشگر خاموش شود فضاپیما همانند یک ماهوارهی مصنوعی و برای مدت زمانی نامحدود به چرخش دور سیارهی کوتوله ادامه خواهد داد. داون نخستین فضاپیمای است که از یک سیارهی کوتوله یعنی سرس دیدار می کند، و همچنین نخستین فضاپیماییست که به دور وستا (دومین سیارک بزرگ در کمربند سیارکی منظومه خورشیدی)، سفر میکند. موفقیت این ربات فضایی به لطف 4 طیفسنج و نیروی پیشرانهی یونی صورت گرفته است.
فضاپیمای مارس اکسپرس (Mars Express)
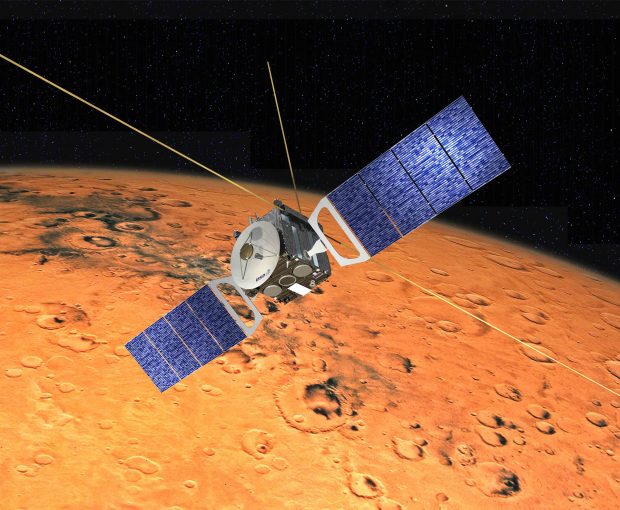
ماموریت فضایی مارس اکسپرس متعلق به آژانس فضایی اروپا (ESAA) از یک کاوشگر به نام بیگل 2 و یک مدارگرد تشکیلشده است. مدارگرد مارس اکسپرس در سال 2003 به کمک موشک سایوز به سمت مریخ روانه فضا شد. این فضاپیما اولین ماموریت آژانس فضایی اروپا به مقصد سیاره مریخ است که به ابزارهایی مانند مولکولیاب و طیفسنج مادون قرمز موسوم به OMEGA برای تجزیه و تحلیل ساختار ترکیبی مریخ مجهز است.
همچنین این مدارگرد دارای یک دوربین است که میتواند عارضههای طبیعی مریخ را تا پهنای دو متر تفکیک کند. مارس اکسپرس در دسامبر 2003 به مریخ رسید و به مطالعهی عارضههای سطحی و توپوگرافیک و فرایندهای زمینشناختی سیاره پرداخته است. این فضاپیما همچنین به بررسی میزان آب موجود در مریخ در گذشته و حال پرداخته و طیفسنج فرابنفش SPICAM نیز وظیفه مطالعه ازن و بخارآب در جو مریخ را به عهده دارد.
مریخ نورد کنجکاوی (Curiosity)
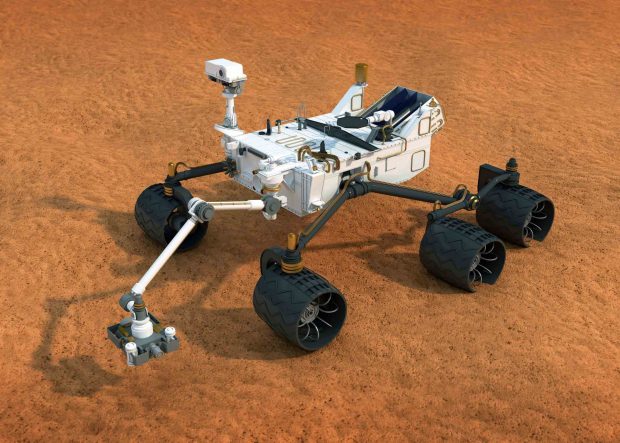
مریخ نورد کنجکاوی چهار سال قبل روی سیاره سرخ فرود آمد تا به ما نشان دهد آیا شبیهترین عضو منظومه شمسی به زمین، نشانهای از حیات در خود دارد یا خیر؟ برای پاسخ به این سوال، این ربات به حفاری و نمونهبرداری از صخرهها و آنالیز شیمیایی ترکیبات به دست آمده میپردازد. این مریخ نورد که اندازهای برابر با یک اتومبیل دارد یک ربات فضایی به حساب میآید و توسط ناسا به مریخ پرتاب شد و وزنی برابر با 899 کیلوگرم دارد و 80 کیلوگرم آن مربوط به لوازم تحقیقاتی میباشد. انرژی مورد نیاز این مریخ نورد بهوسیلهی ژنراتور ترموالکتریک رادیوایزوتوپ تامین میشود. چند کامپیوتر خاص به همراه این کاوشگر به مریخ فرستاده شده است که به اختصار به آن ها RCE گفته میشود. همچنین مریخ نورد کنجکاوی توانایی این را دارد که بهطور مستقیم با زمین ارتباط برقرار کند. کنجکاوی که از آن میتوان به عنوان آزمایشگاهی بر روی چرخ یاد کرد، مسافتی 13.5 کیلومتری را بر روی این سیاره پیموده است.
در تمام مسیر سنگها و صخرهها را بررسی کرده است و در آخرین بهروزرسانی نرمافزاری میتواند بهوسیلهی لیزر نیز به بررسی آنها بپردازد. این مریخ نورد به دنبال یافتههایی از زندگی در گذشتهی سیاره میگردد. کنجکاوی بار اول موفق به کشف نشانههایی از یک دریاچهی آب قدیمی شد که از بزرگترین اکتشافات بر روی مریخ به حساب میآید. از سال 2014 کنجکاوی در مناطقی در حال گشتزنی میباشد که بسیار شبیه به گرند کانیون در ایلات آریزونای آمریکا است. در کنار بررسی سنگها یکی از قابلیتهای مهم کنجکاوی که میتواند آب و هوا را هم مورد بررسی قرار دهد. این موضوع به دانشمندان کمک میکند تا اطلاعات بیشتری دربارهی شرایط کنونی و گذشتهی مریخ را بهدست بیاورند.
مریخ نورد آپورچونیتی (Opportunity)
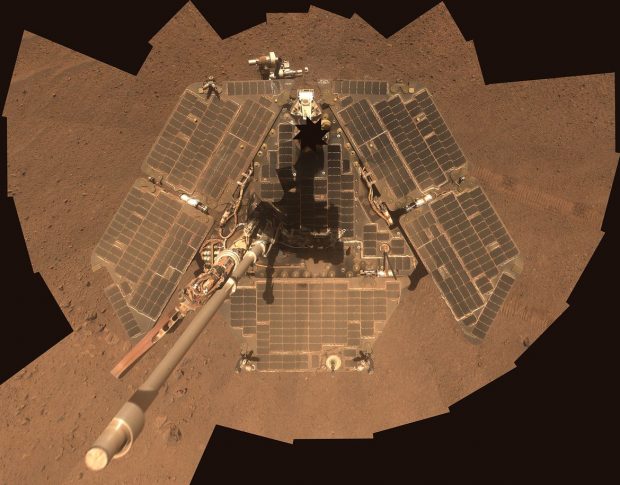
مریخنورد فرصت درسال 2004 بر سطح سیاره سرخ فرود آمد و بیش از یک دهه است که در مریخ به تحقیقات اکتشافی میپردازد. این ربات فضایی 2 طیفسنج و یک تصویربردار میکروسکوپی دارد و همچنین به 128 مگابایت حافظه رم، 3 مگابایت حافظه غیرفرار EEROM و پردازندهی مرکزی با فرکانس 20 مگاهرتز مجهز شده است. مریخ نورد فرصت هماکنون به کاوش و تحقیق در مریخ مشغول است. با پرتاب مریخ نوردهای روح و فرصت یکی از موفقترین دورههای اکتشاف بر روی سیاره سرخ کلید خورد. این دو مریخ نورد که در اصل برای ماموریتی سه ماهه طراحی شده بودند، بیش از 66 سال به اکتشاف بر روی سیارهی سرخ پرداختند و علاوه بر کشفیات بسیار ارزشمندی که داشتند، هزاران تصویر زیبا نیز از سطح مریخ تهیه کردند.
فضاپیمای ادیسه مریخ 2001 (2001 Mars Odyssey)
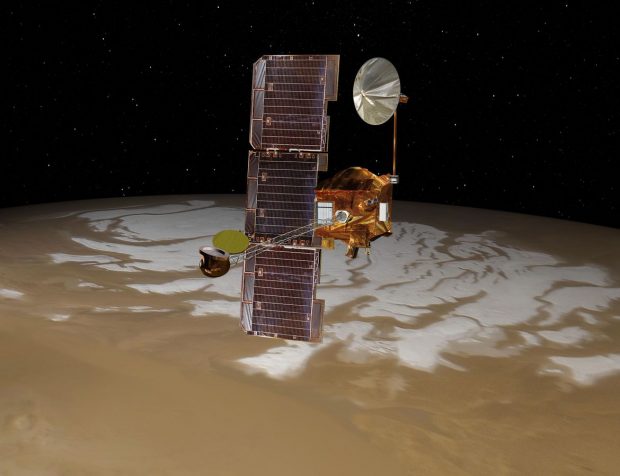
ادیسه مریخ، قدیمیترین مدارگردی است که هنوز در مدارمریخ فعال است. برای این ماموریت ناسا در مریخ هزینه اولیهی 297 میلیون دلاری در حدود 32 ماه در نظر گرفته شده بود. هدف ناسا از ارسال این فضاپیما، امکانسنجی وجود هر نوع ساختار مربوط به حیات از طریق بررسی امکان وجود آب در سطح مریخ و فعالیتهای آتشفشانی با بهرهگیری از طیفسنجها و ابزارهای تصویربرداری الکترونیک تعبیه شده در آن بوده است. این ماهواره با بهکارگیری طیفسنج و آشکارساز فروسرخ میکوشد که برای یافتن نشانه یا نشانههایی از بودن آب در گذشته و یا امروز مریخ پیدا کند. همچنین با پرتونگاری زمینشناسی این سیاره و ویژگیهای آن محیط را بررسی و گزارش کند.
تلسکوپ فضایی هابل (Hubble)

تلسکوپ فضایی هابل یک دستگاه 11 تنی به اندازه یک اتوبوس است و در ارتفاع 547 کیلومتری از سطح زمین با سرعتی که در برخی موارد به 17000 مایل برساعت میرسد به دور زمین میچرخد. این ربات فضایی یکی از 4 رصدگر عظیم ناسا در کنار اسپیتزر، کامپتون و چاندرا است. این تلسکوپ تعدادی دوربین و تجهیزات علمی را با خود حمل میکند که به ترتیب عکسهای بینظیری از فضا گرفته و دادهها را تحلیل می کنند. به لطف ربات فضایی هابل ما میتوانیم سفری به گذشته داشته باشیم چراکه عکسهای گرفته شده توسط آن وضعیت هستی را حتی پیش از آنکه منظومه خورشیدی وجود داشته باشد به تصویر میکشند.
یکی از جالبترین عکسهای گرفته شده توسط این تلسکوپ «میدان دید فرا ژرف هابل» نام دارد که 10 هزار کهکشان در را در یک نقطهی کوچک به تصویر میکشد و تصویر موردعلاقه بسیاری از دانشمندان است. در سال 2018، تلکسوپ فضایی جیمز وب راهی مدار زمین میشود. این دستگاه جدیدتر، قدرتمندتر و البته گرانتر بوده و ابعادی بهاندازهی یک زمین تنیس دارد و قطر آینه در نظر گرفته شده برای آن، دستکم سه برابر هابل است.



























