



محققان دانشگاه هاروراد جدیدا توانستند ربات پرنده ضدضربه ای به اسم روبوبی (RoboBee) تولید کنند که قدرت خود را از موتورهایی نرم دریافت میکند و در صورت برخورد با سطحی سفت، آسیب نخواهند دید.
درگذشته، رباتهای گوچکی مانند روبوبی در دانشگاه هاروارد توسعه داده شده بود اما به دلیل داشتن قطعات سخت و شکننده در اثر برخورد با دیوار یا رباتهای دیگر به راحتی از بین میرفتند. حالا این دانشمندان نسخهی جدید و انعطاف پذیر روبوبی را طراحی کردند که قدرت خود را از عضلات مصنوعی دریافت میکند.
محققان برای ساخت این ربات از الاستومرهای دی الکتریک که در دانشگاه هاروارد ساخته شده استفاده کردهاند. این الاستومرها عایق بوده و میتوانند با دریافت جریان الکتریکی تغییر شکل دهد. محققان همچنین برای افزایش تولیدی این الاستومرها، خاصیت رسانایی الکترودهای آن را تقویت کردهاند.
 این ربات پرنده، اولین میکرورباتی است که با استفاده از محرکهای نرم، پرواز کنترلشدهای را انجام میدهد و گام بزرگی در این صنعنت به حساب میآید، چرا که با وجود ضدضربه بودن آنها، آسیبی به ربات وارد نمیشود. محققان اعلام کردهاند که شک و تردیدهای زیادی در مورد امکان استفاده از چنین محرکهایی برای ساخت رباتهای پرنده وجود داشت و بسیاری از فعالان دچاز تردید بودند، زیرا گفته میشد که این نوع محرکها توان کافی را برای به پرواز درآوردن ربات نخواهد داشت و کنترل آنها بسیار دشوار است.
این ربات پرنده، اولین میکرورباتی است که با استفاده از محرکهای نرم، پرواز کنترلشدهای را انجام میدهد و گام بزرگی در این صنعنت به حساب میآید، چرا که با وجود ضدضربه بودن آنها، آسیبی به ربات وارد نمیشود. محققان اعلام کردهاند که شک و تردیدهای زیادی در مورد امکان استفاده از چنین محرکهایی برای ساخت رباتهای پرنده وجود داشت و بسیاری از فعالان دچاز تردید بودند، زیرا گفته میشد که این نوع محرکها توان کافی را برای به پرواز درآوردن ربات نخواهد داشت و کنترل آنها بسیار دشوار است.
مسئلهی تراکم نیرو با استفاده از تحقیق در مورد محرکات برقی نرم توسط دیوید کلارک در هاروراد حل شد. همانطور که گفتیم، محققان توانستند با بهبود الکترودها موفق به تحریک محرک در 500 هرتز شوند که تقریبا نیرویی برابر محرکهای سفت و سخت موجود در سایر رباتها تولید میکند.
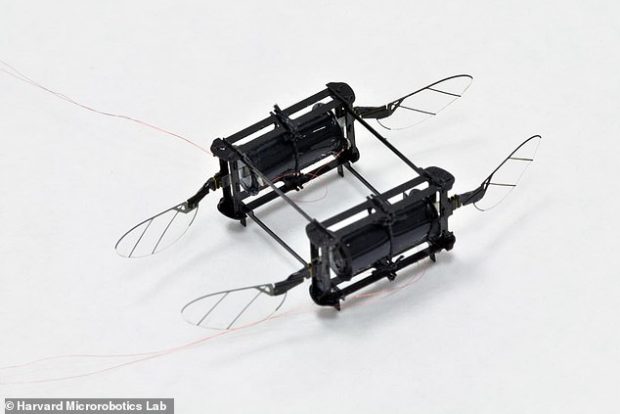
روبوبی در مدل دو بال موجود است که میتواند از زمین بلند شود اما کنترل پرواز آنچنانی ندارد. نمونهی چهاربال این ربات میتواند با کنترل مناسبش در فضاهای شلوغ پرواز کند و از برخورد با اجرام سخت، جان سالم بدر ببرد. تیم تحقیقاتی تولیدکننده در تلاش است تا کارایی و بهرهوری این نسل از رباتهای نرم را افزایش دهد.




























دیگه علم خیلی پیشرفت کرده ها
مقاله عالی بود لذت بردیم
اره دست اورد روز دنیا رو ب نمایش گذاشتن
عجب قابلیت مانور عالی ای داره حال کردم براشون
دیگه ته ته علم دست ایناس
اره دقیقا مثل پشه میمونه بال هاش از ساخته های خداوند تقلید کردن
اینو بهش میگن طراحی خارق العاده
اره واقعا بال های پرندش عالین
برترین دانشگاه دنبا برترین کشور دنیا برترین دانش اموختگان قطعا نتیجه اش غیر از این نمیشه
دانشمندای خودمون بهترش رو میسازیم
ووای مگه میشه
برارین های دنیا در برابر برترین های ایران
قطعا اونا یک سر و گردن بالا ترن
اره ما از لحاظ علم تحریمیم که خیلی بده
ببین این دیگه چ تعصبی داره اخه خخخ