


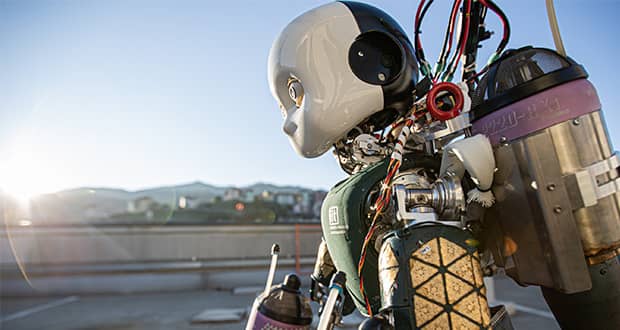
اولین ربات انسان نمای پرنده با نام iRonCun علیرغم ظاهر عجیب خود، نویدبخش پیشرفت قابل توجهای در عرصه رباتیک است.
محققان موسسه فناوری ایتالیا (Italian Institute of Technology یا به اختصار IIT) بهتازگی جدیدترین ساخته خود یعنی اولین ربات انسان نمای پرنده با نام iRonCub را به نمایش گذاشتهاند که شاید در نگاه اول کمی عجیب به نظر بیاید اما نوآوری قابل توجهای را با خود به ارمغان میآورد و همچنین هدف از طراحی آن امدادرسانی به انسان در حوادث است.

«دانیله پوچی» (Daniele Pucci)، مدیر آزمایشگاه هوش مصنوعی و مکانیکی این موسسه، در گفتوگو با TechXplore اظهار داشته که ایده اولیه ساخت این ربات انسان نمای پرنده حوالی 2016 شکل گرفته است. هدف از طراحی این ربات، امدادرسانی در حوادثی مثل سیل و آتشسوزی است؛ زمانی که امکان دسترسی انسان به افراد درون ساختمانهای تخریبشده وجود ندارد.
پرواز، راه رفتن روی زمین و کنترل اجسام سه ویژگی اصلی اولین ربات انسان نمای پرنده هستند. از آنجا که بسیاری از رباتهای انسان نما قادر به راه رفتن روی زمین و جابهجا یا کنترل کردن اجسام هستند، تیم موسسه فناوری ایتالیا تصمیم گرفت بهجای توسعه یک ربات کاملاً جدید از پایه، صرفاً قابلیتهای یک ربات انسان نما را توسعه بدهد.

به گفته پوچی، ربات iRonCub میتواند از ساختمانی به ساختمان دیگر پرواز کند، درها را باز کند، شیرهای گاز را ببندد یا در جستوجوی بازماندگان حادثه، داخل ساختمانها را بررسی کند.
اولین ربات انسان نمای پرنده یک نوآوری مهم را هم با خود به دنبال دارد. کنترل حرکت رباتها و هرگونه جسم پرنده دیگری، نیازمند سیستمهایی جهت تخمین نیروی رانش تولیدشده توسط پروانهها است. از آنجا که اندازهگیری نیروی رانش بهصورت مستقیم دشوار است، معمولاً این امر بر اساس دادههای جمعآوری شده توسط سنسورهای متصل به رباتها صورت میگیرد.

با این وجود، تیم موسسه فناوری ایتالیا سیستمی جدید را برای تخمین نیروی رانش بدون نیاز به سنسورها ارائه داده و مقالهای را درباره نتیجه تحقیقات خود در وبسایت IEEE Robotics and Automation Letters منتشر کرده است. لازم به ذکر است این سیستم با دو روش به اطلاعات مورد نیاز دست پیدا میکند؛ روش اول، تطابق دستورهای ارسالشده به موتور جت با نیروی رانش تولیدشده است و روش دیگر، ارزیابی «تکانه مرکز هندسیِ» کل ربات است. گفتنی است سیستم جدید برای تخمین نیروی رانش، منجر به سادهتر شدن طراحی این ربات و کاهش هزینه ساخت شده است.

پوچی و تیم او پیشتر رباتی با نام iCub را ساخته بودند که میتوانست تعادل خود روی زمین را حفظ کند و بهعنوان مثال، روی یک پا بایستد. آنها سپس روی توسعه قابلیت پرواز این ربات کار کردند و نهایتاً iRonCub را بهعنوان اولین ربات انسان نمای پرنده توسعه دادهاند.
همچنین بخوانید:
در ادامه ویدئویی از ربات انسان نمای پرنده iRonCub را مشاهده میکنید:




























پس اون ویدیویی همقرار بود اون آدمک مسخره پرواز کنه چی شد ها ؟ اینکه روی زمین نمیتونه بایسته و آویزانش کردن . اونوقت چطوری قراره پروازم بکنه . من نمیدونم چجوری نون دروغ های خودتون رو به زن و بچه های بیگناهتون میدی بخورن ها ؟ لطف کنید کمی وجدان بخرید
ایرانم داره انتظارشو داشتم اینم بسازن👈😐
👕
👖