


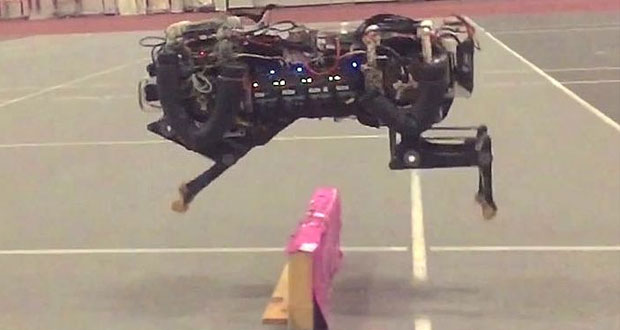
بیومیمتیک (Biomimetics) صنعتی برای شبیه سازی موجودات زنده می باشد.از جمله محصولات این صنعت می توان به ربات چیتای دونده دانشگاه MIT و همچنین نمونه مشابه آن در بوستون داینامیکس با تعادلی شگفت انگیز اشاره کرد. دانشگاه MIT در ادامه توسعهی ربات دونده چیتا در ویدیویی نشان داده که این ربات چگونه قادر بع پرش ار روی موانع در حال دویدن است.محققان MIT برای ساخت این ربات از چیتا یا یوزپلنگ الهام گرفته اند.
دانشگاه MIT چندی پیش دومین نسخهی چیتا را معرفی کرده که سرعت و پرش آن نسبت به قبل بهبود یافته است. پرشی در حد ۴۰ سانتیمتر با مکانیزمی که درست شبیه چیتای واقعی است، تنها جاذبهی چیتا نیست بلکه از آن مهمتر مراحلی است که محققین طی کردهاند تا ربات موانع را تشخیص داده و عمل پرش را انجام دهد.
برای شناسایی مانع از حسگر لیزری در سمت جلو استفاده میشود و الگوریتمهای پردازش تصویر آن قدر سریع و بهینه هستند که به صورت آنی اجرا میشوند. قدم دوم این است که ربات ارتفاع و فاصلهی مانع را تخمین بزند. مرحلهی سوم هم تنظیم قدمهاست تا ربات برای پریدن به نقطهی مطلوب برسد. به این منظور باید مثل چیتای واقعی قدمها را کوتاهتر یا بلندتر کند و چنین کاری ساده نیست. بعد از رسیدن به نقطهی مورد نظر، نیروی فشاری پاها به گونهای انتخاب میشوند که ربات از روی مانع به درستی بپرد.با تمام چالشهایی که مطرح شده، محققان MIT کارشان را به نحو احسن انجام دادهاند و ربات چیتا واقعاً مثل یک موجود زنده محاسبه میکند و درست میپرد.
منبع : Gizmodo
خیلی جالب بود … معلومه باید خیلی محاسبات پیچیده ای داشته باشه