
سالتو (Salto)، یک ربات پارکور کار طراحی شده توسط دانشگاه کالیفرنیا برکلی است که همانند یک انسان فعال در ورزش پارکور، میتواند به صورت حرفهای و پشت سر هم در حالت عمودی بپرد. توسعه دهندگان این ربات جذاب امیدوارند تا از سالتو در عملیاتهای جستجو و نجات که در آن میتواند به سرعت در اطراف یک محیط پیچیده حرکت کند، استفاده شود.
سالتو در واقع زاییده ذهن دانکن هالدین (Duncan Haldane)، فیزیکدان و مدرس رباتیک در دانشگاه کالیفرنیا برکلی (شخصیست که یک سیستم پرش جدید را آزموده) است. به عنوان توضیحاتی که در مقاله معرفی این ربات در مجله “Science Robotics” منتشر شده، سالتو از یک استراتژی خیزشی و انرژی ذخیره سازی که در حیواناتی نظیر شب دوست (یک پستاندار کوچک که به پرش های بلند معروف است) دیده میشود، استفاده میکند. سالتو نیز درست همانند شب دوست میتواند خیلی سریع و بلند بپرد. آن میتواند به صورت ایستاده تا ارتفاع یک متری بپرد و پس از آن دقیقا همان پرش را با قرار دادن پای خود بر روی یک سطح، انجام دهد.
ترفند زیستی که ربات پارکور کار سالتو از آن الهام گرفته است «مدولاسیون قدرت» نام خواهد داشت که این نه تنها به سالتو کمک کرده تا بلندترین پرش توسط یک ربات را به نام خود به ثبت برساند، بلکه منجر به ساخت یک ربات با پرش هایی بسیار جذاب شده که آن را شبیه به یک پارکور کار فوق حرفهای رباتیک ساخته است. این روش جدید میتواند کمک کند تا در آیندهای نزدیک از این ربات های پارکور کار در عملیاتهای جستجو و نجات استفاده کنیم.
دانکن هالدین به گیزمودو در مورد این ربات گفته است:
مدولاسیون قدرت، میتواند هر زمانی که قدرت خروجی از اندام در هنگام پرش از عضلات ساطع میشود، تولید شود. این دقیقا چیزیست که در پشت حرکات انفجاری در طبیعت نظیر حرکات یک میگوی آخوندکی (Mantis shrimp)، وجود دارد. موضوع مشترک بین آنها، محدودیت بارگذاری انرژی عضلات در ساختارهای فنری است که بسیار سریع انرژی را بازمیگردانند. حیوانات برای پریدن، یک ایده جدید به ما دادند تا ما از آنها در ربات ها استفاده کنیم.
حیواناتی نظیر شب دوست از وضعیت بدنی فوقالعاده خمیدهای برخوردارند ک به آنها کمک میکند تا پایین بمانند و عضلات آنها زمان بیشتری برای کشیده شدن تاندونها داشته باشد. هنگامی که این شب دوستها از این وضعیت خارج میشوند، تمام انرژی ذخیره شده در تاندونها به سرعت آزاد میشود و اجازه میدهد تا آنها پرش های بلندی داشته باشند. این حیوانات میتوانند تنها در چهار ثانیه، پنج مرتبه بپرند و وقتی پرش آنها را کنار هم میگذاریم، اندازه شگفت انگیز 8 و نیم متر، در جلوی رکورد پرش آنها ثبت میشود. در ربات ها ما به جای عضلات از موتور و به جای تاندون از فنرها استفاده کردهایم. بنابراین ما یک موتور داریم که به وسیله یک فلز کنترل میشود.
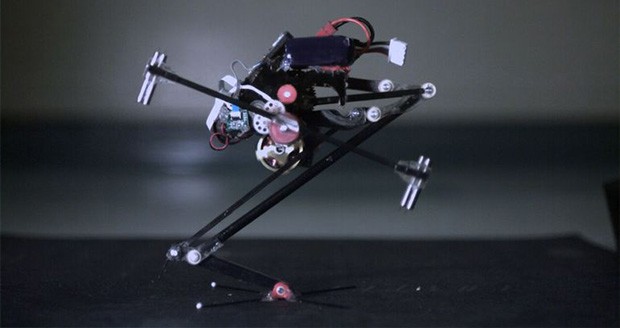
ربات پارکور کار سالتو، بدون خستگی به صورت مداوم میپرد
ربات پارکور کار سالتو، با استفاده از مدولاسیون قدرت نیازی به استراحت قبل از پرش ندارد که همین قضیه موجب میشود تا آن به خوبی آماده پرش های بعدی باشد. این ربات در حال حاضر دارای وزن تنها 100 گرم و اندازه 26 سانتیمتر است. گفتنیست که سالتو میتواند در هر ثانیه 1.76 متر بپرد و در جهش دوم نیز باید مقابل اسم آن پرش 1.71 متری را بنویسیم.