



ربات امداد و نجات Centauro با طراحی متفاوت خود میتواند آینده ساخت رباتهای امدادگر را متحول کند. محققان این موضوع را با نمایش فواید استفاده از چهار چرخ و دو بازوی کاراتهکار نشان دادهاند.
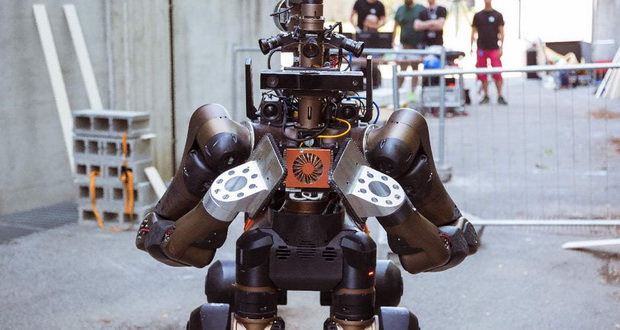
چه چیزی شش پا، چهار چرخ و دو دست کاراتهکار دارد؟ ربات امداد و نجات Centauro که توسط گروه ایتالیایی Istituto Italiano di Tecnologia ساخته شده است.
“Centauro” جدیدترین تجربه دانشمندان برای پیدا کردن سازگارترین و مفیدترین شکل برای رباتهایی است که برای کمک در بلایای طبیعی طراحی شده و ظاهری متفاوت از نمونههای مشابه دارند. معمولا، این ماشینها با دو دست و دو پا، با ظاهری مشابه انسانها ساخته میشوند، اما محققان میگویند همواره معتقدند که طراحیهای هیبریدی انعطافپذیری بالاتری دارند. Centauro با چهار پای چرخی خود پایدارتر از رباتهای شبیه انسان است، ولی همچنان بازوهایی را که برای دستکاری اشیای مختلف به آنها نیاز دارد، حفظ کرده است. هرچند، ظاهرا این دستهای کاراتهکار توانایی خرد کردن اشیا را هم دارند.
مطابق با گزارش “IEEE Spectrum”، ربات Centauro بر پایه Momaro طراحی شده است؛ رباتی مشابه که محققان دانشگاه بن مسئولیت توسعه آن را بر عهده داشتهاند. Momaro برترین ربات در چالش رباتیک دارپا در سال 2015 بود؛ جایی که توانایی رباتها در انجام وظایفی که ممکن بود در سناریوهای امداد و نجات با آنها مواجه شوند، آزمایش شد. دیگر رباتهای برتر در این رقابت نیز طراحی هیبریدی داشتند که از جمله آنها میتوان به ماشین ساختهشده توسط دانشگاه KAIST کره جنوبی اشاره کرد. محققان این دانشگاه رباتی طراحی کرده بودند که از حالت دوقطبی به یک ربات چرخدار تبدیل میشد.
ربات امداد و نجات Centauro با 1.5 متر ارتفاع، 93 کیلوگرم وزن داشته و از مواد فلزی سبکوزن (مثل آلومینیوم و «پوست» پلاستیکی که با فناوری چاپ سهبعدی تولید شده) ساخته شده است. طول عمر باتری این ربات به 2.5 ساعت میرسد و همواره توسط یک اپراتور انسانی کنترل میشود.
هرچند، مهمترین نقطه فروش این طراحی را میتوان انعطافپذیری آن عنوان کرد. هرکدام از اندامهای این ربات با آزادی در 6 جهت طراحی شده و میتوانند در لگن، زانو و مچ بچرخند. این یعنی ربات بسته به موقعیتهای مختلف میتواند حالتهای متفاوتی را به خود بگیرد. حالت چرخدار (برای حرکت سریع) و حالت نشسته «عنکبوتی» (برای پایداری بالاتر هنگام انجام کارها یا عبور از سطوح ناهموار) از جمله این موارد هستند.
البته، طراحی ربات هم چالشهای خاص خود را دارد. محققان باید بفهمند که بهترین حالت برای کنترل ربات چیست و توانایی آن را باید با انجام کارهای سختتر هم بسنجند. چه کسی میداند؛ شاید روزی برسد که رباتهایی با طراحی سانتور مشغول نجات انسانها باشند.



